In today’s post, we introduce the six postulates of quantum mechanics. Together, they establish the vector as the fundamental object of the theory—that which provides the quantum description of a physical system. Quantum mechanics uses lots of jargon, so we will translate specialized terms into those commonly used in linear algebra, the mathematical backbone of the theory that lays down the rules that the system follows. With the six postulates defined, we will then see how quantum mechanics compares to classical theory: we will see that the Hamilton–Jacobi equations and Newton’s second law of motion emerge from quantum mechanics.
Our principal source is the material in chapters 2 and 3 from the textbook Quantum Mechanics by Claude Cohen-Tannoudji, Bernard Diu, and Franck Laloë.
1. Introduction
We begin with the six postulates of quantum mechanics, which define the mathematical framework the theory. To set the mood, here they are in English: 1) The momentary state of a physical system can be described as a vector in an abstract vector space. 2) Each observable quantity of the physical system can be described as a matrix that acts on the state vector through matrix multiplication. 3) When making a measurement, we will apply the matrix for the quantity being measured to the state vector of the system; the matrix has an eigenvalue decomposition, and the outcome of the measurement will always be one of its eigenvalues. 4) The particular outcome observed will be determined randomly: the eigenvalues most likely to be observed are those with eigenvectors best resembling the state vector just before measurement. 5) Right after the measurement, the state vector will abruptly change to match the eigenvector that corresponds to the eigenvalue observed. 6) Between measurements, the state vector smoothly evolves according to a differential equation associated with the total energy of the system.
That’s it. These six sentences form the core of the theory. But the more you think about it—the abrupt, random changes of the system after measurement—the less the world described makes sense. Yet, we cannot discard the theory. As strange as it is, quantum mechanics has passed all experimental tests attempted so far, the most stringent ones requiring precision well beyond any other theory conceived.
In the next section, we will make the postulates more precise by providing some of the mathematics of the theory. The level of rigor will remain informal but should enable us to better appreciate the consequences of the theory. By proceeding in this way, we aim to demonstrate how theoretical physicists go about their work: mathematical theory first, consequences second, and occasionally `What does it all mean?’ third. The rationale for this approach is simple: for all we can see, the rules of nature are written in mathematics, and nature always sticks to her rules. Therefore, good physical theories cannot afford arbitrary qualities; they must be fully constrained by mathematics. The final arbiter about a theory, of course, is experiment. Physical theories ought to make falsifiable predictions, so that they can be rejected if experiment disagrees with their predictions.
2. The Six Postulates
To define the postulates concisely, we consider our system to be a single particle that lives in one space dimension  and one time dimension
and one time dimension  However, quantum mechanics applies to any system within our universe.
However, quantum mechanics applies to any system within our universe.
2.1. First: Quantum States
The first postulate tells us that the momentary state of a physical system can be described as a vector in an abstract vector space.
The quantum state of a particle is fully characterized at a given time by a square-integrable wavefunction  We associate a ket
We associate a ket  of the state space
of the state space  with each
with each  such that
such that

Thus, at fixed time  , the state is defined by
, the state is defined by 
The wavefunction  is the core idea of quantum mechanics and represents a sharp departure from classical physics. In classical mechanics, we only needed a few real numbers to represent the state of a particle at a given time: its position and velocity coordinates. In quantum mechanics, we need one complex number for every point in space to represent the same particle; that is, we need a whole function We made this enormous change because it turns out that particles do not move the way we first thought they did. More information than what is encoded in classical mechanics is needed to fully describe the state of a particle and what it could do next.
is the core idea of quantum mechanics and represents a sharp departure from classical physics. In classical mechanics, we only needed a few real numbers to represent the state of a particle at a given time: its position and velocity coordinates. In quantum mechanics, we need one complex number for every point in space to represent the same particle; that is, we need a whole function We made this enormous change because it turns out that particles do not move the way we first thought they did. More information than what is encoded in classical mechanics is needed to fully describe the state of a particle and what it could do next.
Before getting into this, we need to associate the wavefunction with a vector, which we denote by putting funny brackets around the function  This vector has an infinite number of elements, one for each point in space, and lives in the infinite-dimensional Hilbert space denoted
This vector has an infinite number of elements, one for each point in space, and lives in the infinite-dimensional Hilbert space denoted  The funny brackets come from the bra–ket notation, a brilliant invention by Paul Dirac allowing us to easily distinguish column-vectors called kets written as from row-vectors called bras written as
The funny brackets come from the bra–ket notation, a brilliant invention by Paul Dirac allowing us to easily distinguish column-vectors called kets written as from row-vectors called bras written as 
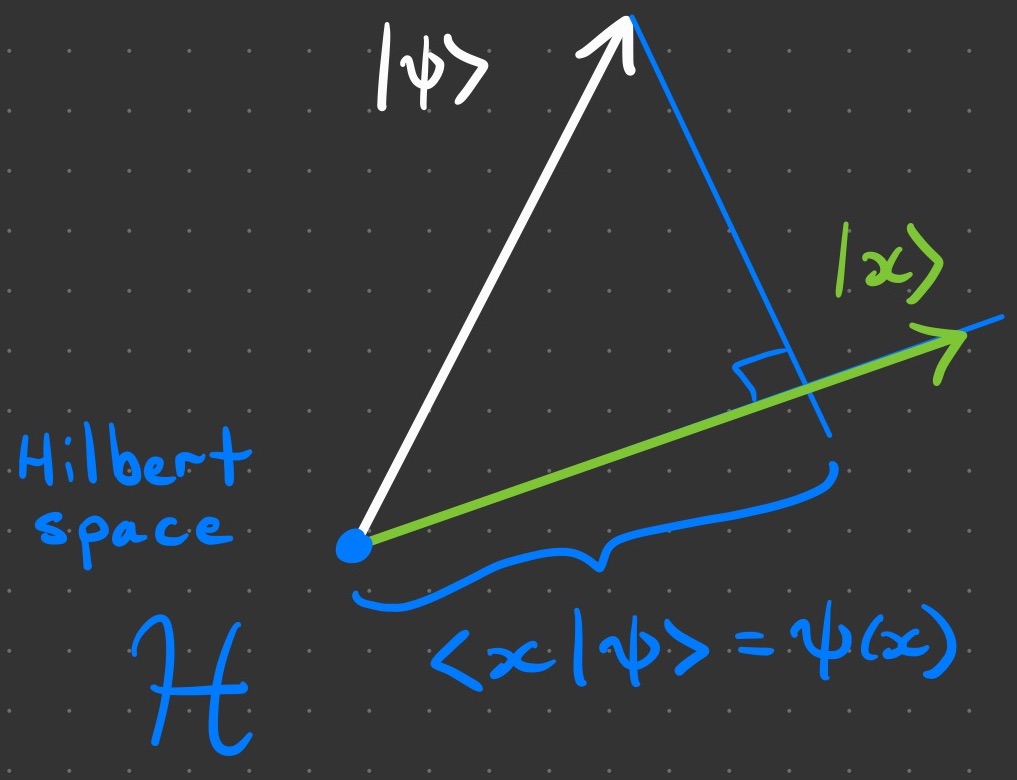
The bra–ket notation will help us leverage the power of linear algebra operations like the inner and outer products, matrix multiplication, and matrix transposition. For example, the inner product was used in equation (1) to explicitly relate wavefunctions to vectors. We can compute the value of the wave function at some point by taking the inner product between and the position vector  that essentially has value
that essentially has value  in the element corresponding to the point and has
in the element corresponding to the point and has  everywhere else. To take an inner product, we need to transpose one of the vectors before multiplying, and this is what a bra is:
everywhere else. To take an inner product, we need to transpose one of the vectors before multiplying, and this is what a bra is:  , where the dagger represents a fancy transpose called the adjoint. So,
, where the dagger represents a fancy transpose called the adjoint. So,  is indeed the inner product that picks out the the element of at the point and multiplies it by ; all other elements are multiplied by
is indeed the inner product that picks out the the element of at the point and multiplies it by ; all other elements are multiplied by  The kets and in are sketched below along with an illustration of the computation
The kets and in are sketched below along with an illustration of the computation 
2.2. Second: Observables
The second postulate tells us that each observable quantity of the physical system can be described as a matrix that acts on the state vector through matrix multiplication.
Every measurable physical quantity  is described by an operator
is described by an operator  acting in We call an observable. Thus, states are associated with vectors and physical quantities with matrix operators in a vector space.
acting in We call an observable. Thus, states are associated with vectors and physical quantities with matrix operators in a vector space.
A measurable quantity can be any number obtained by experiment. We have already seen one such quantity, the position of the particle; call it  The corresponding observable for
The corresponding observable for  is the matrix
is the matrix  that lives in So, to measure the position of the particle with wavefunction , we would consider the matrix product:
that lives in So, to measure the position of the particle with wavefunction , we would consider the matrix product: 
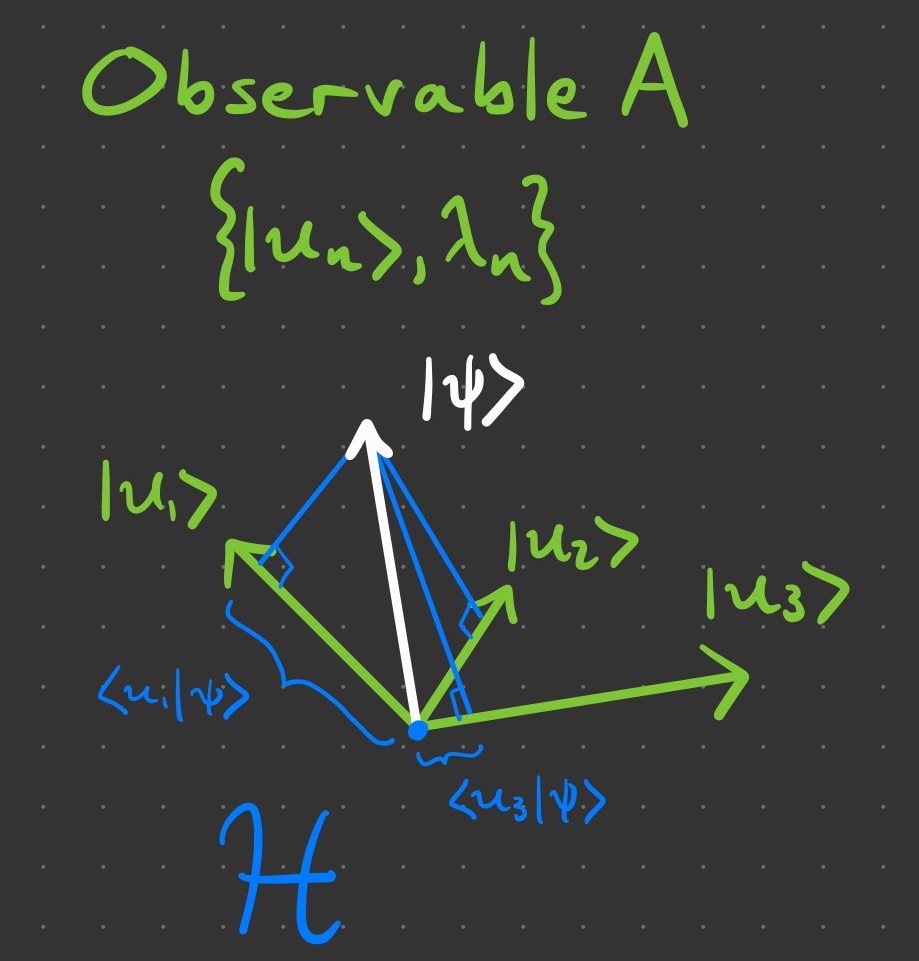
Although a matrix multiplying a vector yields another vector, also in , we will soon see that the purpose of the observable is not to transform the vector but rather to analyze it. For now, we can say that all observables are square matrices whose set of orthogonal eigenvectors span or a proper subset of Therefore, we can think of the matrix product  as the observable representing the vector or its projection in the subspace spanned by the eigenvectors of
as the observable representing the vector or its projection in the subspace spanned by the eigenvectors of  This idea will feature prominently in the remaining postulates, so we illustrate this for a generic physical quantity below.
This idea will feature prominently in the remaining postulates, so we illustrate this for a generic physical quantity below.
Returning to our familiar example of position , the eigenvectors corresponding of the observable are simply the position vectors for each point in space. They are indeed orthogonal from each other. In this case, the set  spans all of , but this need not be the case for a general quantity
spans all of , but this need not be the case for a general quantity  As you may have guessed, the quantity is of special importance: it defines space itself! Another important quantity is the momentum of the particle
As you may have guessed, the quantity is of special importance: it defines space itself! Another important quantity is the momentum of the particle  , and we could have written the wavefunction using the set of all possible momentum vectors, such that
, and we could have written the wavefunction using the set of all possible momentum vectors, such that 
The main point is that any physical quantity is associated with a matrix called an observable that provides a basis of eigenvectors for analyzing a state vector
2.3. Third: Measurement
The third postulate tells that when making a measurement, we must apply the matrix for the quantity being measured to the state vector of the system. The matrix has an eigenvalue decomposition, and the outcome of the measurement will always be one of its eigenvalues.
The only possible outcomes of a measurement of are one of the eigenvalues of Thus, if  is an eigenvector of with real eigenvalue
is an eigenvector of with real eigenvalue  , then measuring entails
, then measuring entails

and the observed outcome is the real number 
Since the Hilbert space is infinite dimensional, any physical quantity whose eigenvectors span must have an infinite number of eigenvectors. For example, has an infinitude of eigenvectors  At the other extreme, some physical quantities have very few possible outcomes. For example, the famous Stern–Gerlach experiment measured whether the spin angular momentum of a silver atom was either
At the other extreme, some physical quantities have very few possible outcomes. For example, the famous Stern–Gerlach experiment measured whether the spin angular momentum of a silver atom was either  or
or  Therefore, the spin quantity
Therefore, the spin quantity  has an observable
has an observable  with only two eigenvectors: spin-up
with only two eigenvectors: spin-up  with
with  or spin-down
or spin-down  with
with  In this case, it is implied that the state of the silver atom also has labels for position and other quantities, but these can be omitted when measuring if the outcome would either fully determine or have no effect on the other quantities.
In this case, it is implied that the state of the silver atom also has labels for position and other quantities, but these can be omitted when measuring if the outcome would either fully determine or have no effect on the other quantities.
The definition above labels the set of eigenvectors of as  Were the state of the system
Were the state of the system  for some
for some  , then the measurement of the quantity would be guaranteed to return the value If we repeated the exact same experiment many times, we would always measure the same value However, were the system a superposition of eigenstates, say
, then the measurement of the quantity would be guaranteed to return the value If we repeated the exact same experiment many times, we would always measure the same value However, were the system a superposition of eigenstates, say  , then it is unclear what the measurement would be. It could either be or
, then it is unclear what the measurement would be. It could either be or  but neither both (surely!) nor anything in between. We will see in the next postulate that the outcome will be purely random.
but neither both (surely!) nor anything in between. We will see in the next postulate that the outcome will be purely random.
2.4. Fourth: Random Outcomes
The fourth postulate tells us that the particular outcome observed is determined randomly: the eigenvalues most likely to be observed are those with eigenvectors that best resemble the state vector immediately before measurement.
For simplicity, we assume that has a discrete and non-degenerate eigenvalue spectrum. When a measurement of is made on a system in state , the probability of observing the outcome is given by

where vectors are normalized to unit length 
That we cannot predict the outcome of a single measurement with certainty—even with perfect information about the system—is a radical departure from classical, deterministic physics. However, the randomness of individual outcomes does not imply that there is no order in the universe and that nothing is predictable. This postulate tells us that we can predict quantitatively how the measurements from a large number of repeated experiments will be distributed across the range, or spectrum, of possible outcomes.
The above paragraph interprets the left-hand side of equation (3), namely, the probabilities  Let us now think about how the right-hand side of the equation calculates these probabilities. First, we see an inner product between the
Let us now think about how the right-hand side of the equation calculates these probabilities. First, we see an inner product between the  eigenvector
eigenvector  and the state vector In words, the inner product
and the state vector In words, the inner product  tells us what these two vectors have in common, or somewhat more precisely, the amplitude of the projection of one vector onto the other. Because the Hilbert space represents complex-valued wavefunctions and is a complex vector space, its inner product is in general also complex-valued. This is why we see the absolute value bars around the inner product in equation (3), so to yield a non-negative real number. Probabilities only make sense for numbers in the unit interval
tells us what these two vectors have in common, or somewhat more precisely, the amplitude of the projection of one vector onto the other. Because the Hilbert space represents complex-valued wavefunctions and is a complex vector space, its inner product is in general also complex-valued. This is why we see the absolute value bars around the inner product in equation (3), so to yield a non-negative real number. Probabilities only make sense for numbers in the unit interval ![{[ 0, 1] }](https://s0.wp.com/latex.php?latex=%7B%5B+0%2C+1%5D+%7D&bg=FFFFFF&fg=000000&s=0&c=20201002) , which explains why all state vectors and eigenvectors must always have unit length. Finally, there is a square in the expression
, which explains why all state vectors and eigenvectors must always have unit length. Finally, there is a square in the expression  Without the square, we still would have probabilities in the unit interval—but they would disagree with experiment. What we do know is the probability of observing a particular outcome goes as the square of the amplitude. That the exponent is exactly
Without the square, we still would have probabilities in the unit interval—but they would disagree with experiment. What we do know is the probability of observing a particular outcome goes as the square of the amplitude. That the exponent is exactly  suggests a geometrical justification, like an inverse-square law, where probability is conserved in toto but spreads out over some surface area.
suggests a geometrical justification, like an inverse-square law, where probability is conserved in toto but spreads out over some surface area.
There is also an important case when the state of the system is exactly equal to one of the matrix eigenvectors  Then, the prediction is that the probability of observing is , and the probability of observing any other eigenvalue is This turns out to be a crucial point for quantum mechanics, as we will see in the next postulate, which leads to the following sensible behavior. Were we to make a rapid succession of measurements, the first outcome observed would be random for general , but subsequent outcomes would be identical to the first. Thus, measurement affects the system by immediately putting it in a state consistent with the outcome. This process involving measurement, probability, and collapse is illustrated below.
Then, the prediction is that the probability of observing is , and the probability of observing any other eigenvalue is This turns out to be a crucial point for quantum mechanics, as we will see in the next postulate, which leads to the following sensible behavior. Were we to make a rapid succession of measurements, the first outcome observed would be random for general , but subsequent outcomes would be identical to the first. Thus, measurement affects the system by immediately putting it in a state consistent with the outcome. This process involving measurement, probability, and collapse is illustrated below.

2.5. Fifth: Wavefunction Collapse
The fifth postulate tells us that right after the measurement, the state vector abruptly changes by becoming equal to the matrix eigenvector corresponding to the eigenvalue that was observed.
If the measurement of on the system in state yields the result , then the state immediately after the measurement becomes the normalized projection of onto the eigensubspace associate with

In the non-degenerate case, the eigensubspace is  , thus,
, thus, 
Here we see explicitly how measurement changes the wavefunction While in general, the system state may be in some superposition of possible measurement outcomes, the act of measurement immediately puts the system into a state compatible with the observed outcome and incompatible with all other alternative outcomes for  , as prescribed in the mapping (4). This measurement-induced state change is known as wavefunction collapse because it destroys any superposition of outcome states the system may have occupied before measurement.
, as prescribed in the mapping (4). This measurement-induced state change is known as wavefunction collapse because it destroys any superposition of outcome states the system may have occupied before measurement.
The mapping shown in (4) uses the projection operator  corresponding to the observed eigenvalue In the simplest case, there is only one eigenvector where
corresponding to the observed eigenvalue In the simplest case, there is only one eigenvector where  This is called the non-degenerate case, and the mapping must simply be
This is called the non-degenerate case, and the mapping must simply be  Notice how this would happen if the operator is
Notice how this would happen if the operator is  Here, we really appreciate the power of the bra–ket notation. A ket (column vector) multiplying a bra (row vector) gives a matrix (an outer product), which is indeed an operator! The numerator of the mapping (4) becomes
Here, we really appreciate the power of the bra–ket notation. A ket (column vector) multiplying a bra (row vector) gives a matrix (an outer product), which is indeed an operator! The numerator of the mapping (4) becomes  This is nothing more than the ket scaled by the inner product
This is nothing more than the ket scaled by the inner product  , i.e., a number. Notice also that the inner product cannot be zero for this mapping because the fourth postulate states that the probability in equation (3) of observing would also be zero. Finally, plugging the outer product in for in the denominator of (4) yields
, i.e., a number. Notice also that the inner product cannot be zero for this mapping because the fourth postulate states that the probability in equation (3) of observing would also be zero. Finally, plugging the outer product in for in the denominator of (4) yields  , where the star denotes the complex conjugate and reverses the order of the bra and ket. Well, this cancels the inner product in the numerator, giving us exactly what we came for,
, where the star denotes the complex conjugate and reverses the order of the bra and ket. Well, this cancels the inner product in the numerator, giving us exactly what we came for, 
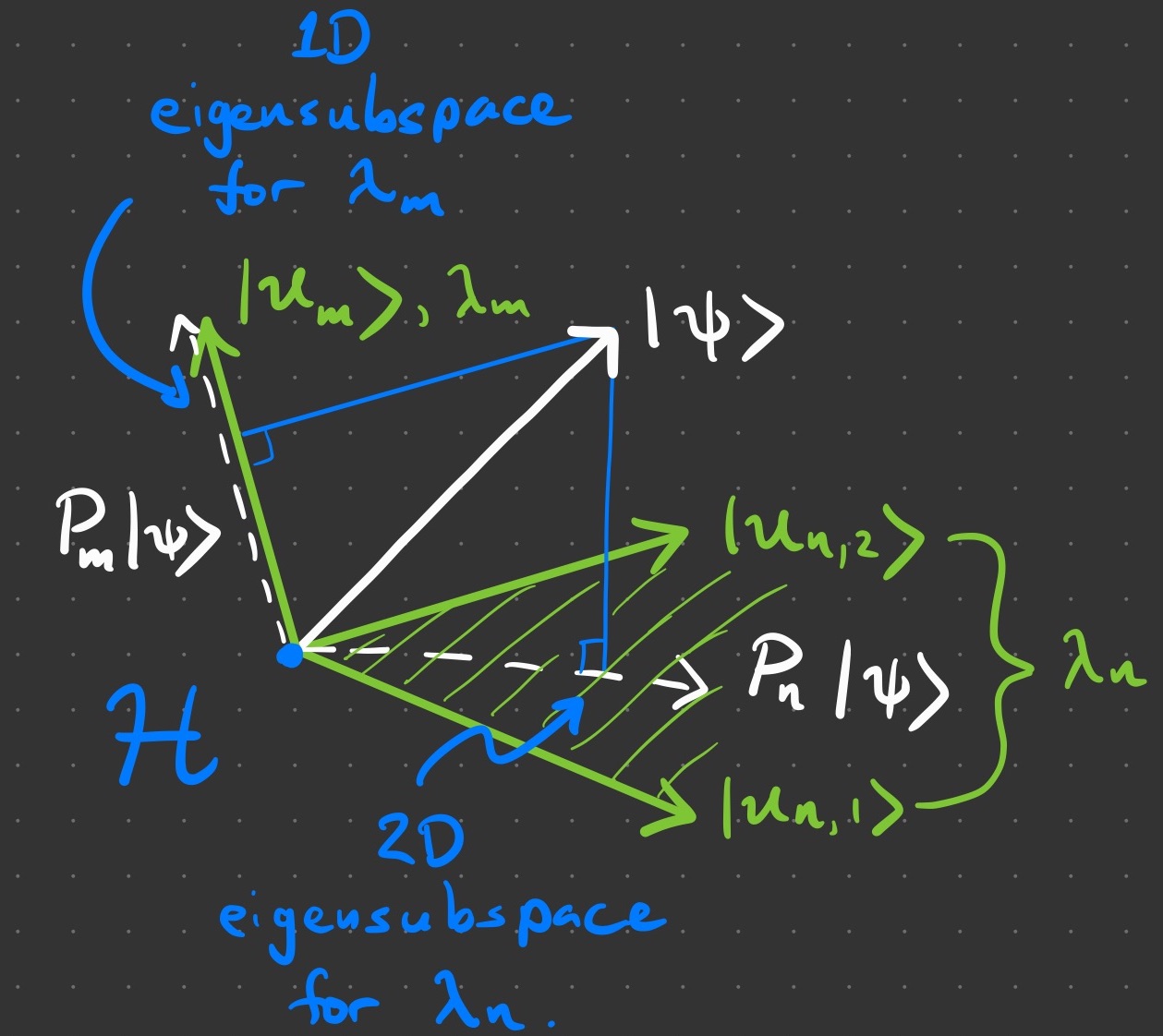
We bothered ourselves with the projection operator because, in general, an eigenvalue will correspond to subspace spanned by two or more eigenvectors, such that  holds for
holds for  In this case, the operator must do something fancier than It must project onto the eigensubspace spanned by
In this case, the operator must do something fancier than It must project onto the eigensubspace spanned by  by keeping the components of that are compatible with and setting the rest to zero. This is achieved if we generalize our projection operator to be the sum
by keeping the components of that are compatible with and setting the rest to zero. This is achieved if we generalize our projection operator to be the sum  Notice how this collapses back to the simple case for
Notice how this collapses back to the simple case for  The action of a projector onto a
The action of a projector onto a  subspace is illustrated below. You can check that the mapping (4) has unit length in this case, too.
subspace is illustrated below. You can check that the mapping (4) has unit length in this case, too.
2.6. Sixth: Wavefunction Evolution
The sixth postulate tells us that between measurements, the state vector smoothly evolves according to a differential equation associated with the system’s total energy.
The evolution of the state  is governed by the Schrödinger equation
is governed by the Schrödinger equation

where  is the Hamiltonian operator, the observable associated with the total energy of the system. An important example is the spinless particle of mass
is the Hamiltonian operator, the observable associated with the total energy of the system. An important example is the spinless particle of mass  in a scalar potential
in a scalar potential  , which has the Hamiltonian
, which has the Hamiltonian

The sixth and final postulate establishes the dynamics of quantum mechanics. The Schrödinger equation (5) is a linear first-order differential equation in time that prescribes the state vector at some moment, say  , to be the value of the function
, to be the value of the function  at
at  The function must satisfy the differential equation (5), whose solutions are determined by the Hamiltonian operator , also a function of time in general. A lot of physics is encoded into equations (5) and (6). Perhaps most important is the appearance of the Planck constant
The function must satisfy the differential equation (5), whose solutions are determined by the Hamiltonian operator , also a function of time in general. A lot of physics is encoded into equations (5) and (6). Perhaps most important is the appearance of the Planck constant  , whence the term quantum (see the post Everything Waves). Here, we touch on the relevant points to our discussion.
, whence the term quantum (see the post Everything Waves). Here, we touch on the relevant points to our discussion.
First, is indeed an observable acting on  Like all observables, has an eigenvalue decomposition. Its eigenvalues quantify the all-important total energy of the system, thus their special symbol
Like all observables, has an eigenvalue decomposition. Its eigenvalues quantify the all-important total energy of the system, thus their special symbol  instead of our generic When the total energy is constant, then the system is said to be conservative, and we simply write the Hamiltonian as
instead of our generic When the total energy is constant, then the system is said to be conservative, and we simply write the Hamiltonian as  with eigenvalue spectrum
with eigenvalue spectrum  The energy of a conservative system transforms without loss from kinetic to potential and back again, such as in the case of a particle trapped in a potential well with kinetic energy
The energy of a conservative system transforms without loss from kinetic to potential and back again, such as in the case of a particle trapped in a potential well with kinetic energy  This is what is prescribed by equation (6).
This is what is prescribed by equation (6).
Second, as mentioned before, the position and momentum  are actually observables. It is sensible to rewrite equation (6) in terms of the matrix operators and
are actually observables. It is sensible to rewrite equation (6) in terms of the matrix operators and  ; notice how
; notice how  immediately makes sense as a matrix acting on the state vector It will also be of central importance to make the connection between the variables
immediately makes sense as a matrix acting on the state vector It will also be of central importance to make the connection between the variables  and the observables
and the observables  when we explore the quantum origin of classical mechanics in the next section.
when we explore the quantum origin of classical mechanics in the next section.
Finally, it is worth considering solutions to the Schrödinger equation for constant Hamiltonian  Suppose at time we had
Suppose at time we had  Then a measurement of the total energy would yield
Then a measurement of the total energy would yield  , and
, and  would consequently not change. The general solution to the Schrödinger equation (being of first-order) has an exponential form
would consequently not change. The general solution to the Schrödinger equation (being of first-order) has an exponential form  , varying only by a global phase factor. Although the global phase rotates over time, it has no effect on any observable because the square of the amplitude will always replace it by
, varying only by a global phase factor. Although the global phase rotates over time, it has no effect on any observable because the square of the amplitude will always replace it by  Therefore, states at different times are always physically indistinguishable. Had we started with the more general case, a superposition of eigenstates
Therefore, states at different times are always physically indistinguishable. Had we started with the more general case, a superposition of eigenstates  , then our solution to the Schrödinger equation (being linear) would involve relative phase factors
, then our solution to the Schrödinger equation (being linear) would involve relative phase factors  Relative phases will interfere before the amplitude is squared, so states at different times are in fact physically distinguishable.
Relative phases will interfere before the amplitude is squared, so states at different times are in fact physically distinguishable.
So much for the postulates of quantum mechanics. It would be natural to feel uneasy with the caricatural presentation given here. Indeed, this is no substitute for a rigorous course of study. Having seen the core of the theory will hopefully help you decide whether to follow the rabbit hole any deeper.
3. Classical Mechanics Redux
In this final section, we derive the laws of classical mechanics using what we have learned above. We will also need new material, but don’t sweat it if you have not seen it before; consider it an opportunity to dig deeper. Our goal here is merely to illustrate how the classical emerges from the quantum without diving into detail.
We begin with our observables for position and momentum and compute their expectation, or mean values,


Notice how the bra–ket notation makes it clear that each expectation is simply a scalar function of time, very much how we describe a classical particle using  and
and  These expectations are the average position and momentum obtained by repeating many experiments measuring and of our system in state
These expectations are the average position and momentum obtained by repeating many experiments measuring and of our system in state
We would like to know the dynamics for these operators of average position and momentum. The dynamics are the rules that determine how our system goes from one state to the next; they are known as the equations of motion.
Given a system with Hamiltonian , the equations of motion for any constant operator were found by Werner Heisenberg to be
![\displaystyle \mathrm{i} \frac{\mathrm{d}}{\mathrm{d} t} A = [ A, H ], \ \ \ \ \ (9)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Cmathrm%7Bi%7D+%5Cfrac%7B%5Cmathrm%7Bd%7D%7D%7B%5Cmathrm%7Bd%7D+t%7D+A+%3D+%5B+A%2C+H+%5D%2C+%5C+%5C+%5C+%5C+%5C+%289%29&bg=FFFFFF&fg=000000&s=0&c=20201002)
where ![{[A, H] = A H - H A}](https://s0.wp.com/latex.php?latex=%7B%5BA%2C+H%5D+%3D+A+H+-+H+A%7D&bg=FFFFFF&fg=000000&s=0&c=20201002) is called the commutator of and
is called the commutator of and
Let us take a moment to discuss commutation relations between operators because they are extremely important in quantum mechanics. Operators are represented as matrices, so the order of matrix multiplication matters, unlike scalars which always commute (e.g.,  ). A non-vanishing commutation relation implies that the eigenstates of the two operators are not compatible, so the system cannot simultaneously be in an eigenstate for both operators. Therefore, a non-vanishing commutation relation between two operators means that you cannot measure both quantities simultaneously. The most famous example comes from the Heisenberg uncertainty principle, which states that one cannot measure position and momentum simultaneously. This is encoded in the all-important canonical commutation relations
). A non-vanishing commutation relation implies that the eigenstates of the two operators are not compatible, so the system cannot simultaneously be in an eigenstate for both operators. Therefore, a non-vanishing commutation relation between two operators means that you cannot measure both quantities simultaneously. The most famous example comes from the Heisenberg uncertainty principle, which states that one cannot measure position and momentum simultaneously. This is encoded in the all-important canonical commutation relations
![\displaystyle [X_i, P_j] = \mathrm{i} \delta_{ij}, \ \ \ \ \ (10)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle+++%5BX_i%2C+P_j%5D+%3D+%5Cmathrm%7Bi%7D+%5Cdelta_%7Bij%7D%2C+%5C+%5C+%5C+%5C+%5C+%2810%29&bg=FFFFFF&fg=000000&s=0&c=20201002)
where  index the spatial directions
index the spatial directions  , and
, and  for
for  and otherwise is called the Kronecker
and otherwise is called the Kronecker  -function.
-function.
Now, let us return to the task at hand. Our system has Hamiltonian operator

and we can plug our  and
and  operators in place of Notice that any operator commutes with itself, i.e.,
operators in place of Notice that any operator commutes with itself, i.e., ![{[A, A] = 0.}](https://s0.wp.com/latex.php?latex=%7B%5BA%2C+A%5D+%3D+0.%7D&bg=FFFFFF&fg=000000&s=0&c=20201002) This implies that
This implies that ![{[X, V(X)] = 0}](https://s0.wp.com/latex.php?latex=%7B%5BX%2C+V%28X%29%5D+%3D+0%7D&bg=FFFFFF&fg=000000&s=0&c=20201002) as well as
as well as ![{[P, P^2] = 0.}](https://s0.wp.com/latex.php?latex=%7B%5BP%2C+P%5E2%5D+%3D+0.%7D&bg=FFFFFF&fg=000000&s=0&c=20201002) Altogether, we find our equations of motion become
Altogether, we find our equations of motion become
![\displaystyle \mathrm{i} \frac{\mathrm{d}}{\mathrm{d} t} \langle X \rangle = \big\langle [ X, H ] \big\rangle = \Big\langle \Big[ X, \frac{P^2}{2m} \Big] \Big\rangle, \ \ \ \ \ (12)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Cmathrm%7Bi%7D+%5Cfrac%7B%5Cmathrm%7Bd%7D%7D%7B%5Cmathrm%7Bd%7D+t%7D+%5Clangle+X+%5Crangle+%3D+%5Cbig%5Clangle+%5B+X%2C+H+%5D+%5Cbig%5Crangle+%09%3D+%5CBig%5Clangle+%5CBig%5B+X%2C+%5Cfrac%7BP%5E2%7D%7B2m%7D+%5CBig%5D+%5CBig%5Crangle%2C++%5C+%5C+%5C+%5C+%5C+%2812%29&bg=FFFFFF&fg=000000&s=0&c=20201002)
![\displaystyle \mathrm{i} \frac{\mathrm{d}}{\mathrm{d} t} \langle P \rangle = \big\langle [ P, H ] \big\rangle = \big\langle [ P, V(X) ] \big\rangle. \ \ \ \ \ (13)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Cmathrm%7Bi%7D+%5Cfrac%7B%5Cmathrm%7Bd%7D%7D%7B%5Cmathrm%7Bd%7D+t%7D+%5Clangle+P+%5Crangle+%3D+%5Cbig%5Clangle+%5B+P%2C+H+%5D+%5Cbig%5Crangle+%09%3D+%5Cbig%5Clangle+%5B+P%2C+V%28X%29+%5D+%5Cbig%5Crangle.++%5C+%5C+%5C+%5C+%5C+%2813%29&bg=FFFFFF&fg=000000&s=0&c=20201002)
Using the canonical commutation relations in equation (10), the commutator in the equations of motion for position (12) is
![\displaystyle \Big\langle \Big[ X, \frac{P^2}{2m} \Big] \Big\rangle = \frac{1}{2m} \big( [X,P] P + P [X, P] \big) = \frac{\mathrm{i}}{m} P. \ \ \ \ \ (14)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5CBig%5Clangle+%5CBig%5B+X%2C+%5Cfrac%7BP%5E2%7D%7B2m%7D+%5CBig%5D+%5CBig%5Crangle+%3D+%5Cfrac%7B1%7D%7B2m%7D+%5Cbig%28+%5BX%2CP%5D+P+%2B+P+%5BX%2C+P%5D+%5Cbig%29+%3D+%5Cfrac%7B%5Cmathrm%7Bi%7D%7D%7Bm%7D+P.+%5C+%5C+%5C+%5C+%5C+%2814%29&bg=FFFFFF&fg=000000&s=0&c=20201002)
The commutator in the equations of motion for momentum (13) is found using the correspondence between the momentum and differential operators  , yielding
, yielding
![\displaystyle \langle [ P, V(X) ] \rangle = - \mathrm{i} \big(\nabla V(X) - V(X) \nabla \big) = -\mathrm{i} \nabla V(X). \ \ \ \ \ (15)](https://s0.wp.com/latex.php?latex=%5Cdisplaystyle++%5Clangle+%5B+P%2C+V%28X%29+%5D+%5Crangle+%3D+-+%5Cmathrm%7Bi%7D+%5Cbig%28%5Cnabla+V%28X%29+-+V%28X%29+%5Cnabla+%5Cbig%29+%3D+-%5Cmathrm%7Bi%7D+%5Cnabla+V%28X%29.+%5C+%5C+%5C+%5C+%5C+%2815%29&bg=FFFFFF&fg=000000&s=0&c=20201002)
Restoring these results into the equations of motion (12) and (13) reads


which is known as Ehrenfest’s theorem in quantum mechanics.
By interpreting the averages of the position and momentum operators as the scalar variables of classical mechanics,  and
and  , we find the Hamilton–Jacobi equations of classical mechanics, as advertised. Combining these two equations, we obtain Newton’s second law of motion, where force is defined as the rate-of-change of momentum or, equivalently, as the negative of the gradient of the potential
, we find the Hamilton–Jacobi equations of classical mechanics, as advertised. Combining these two equations, we obtain Newton’s second law of motion, where force is defined as the rate-of-change of momentum or, equivalently, as the negative of the gradient of the potential

